With its seamless integration into your robotic system, Tcp.Check enables fully automated, continuous TCP verification and correction during live production.
This ensures consistent product quality while minimizing downtime and costly rework.
Tcp.Check includes all required software and hardware components to periodically verify the tool TCP and automatically update it when deviations are detected.
An intuitive setup wizard makes installation quick and straightforward.
Tcp.Check is ready for operation within minutes.
Configurable functions allow alerts to be sent to a supervisory PLC when defined tolerance limits are exceeded.
All measurement data is clearly displayed via the integrated HMI.
A function call within the robot program initiates the TCP verification process. The robot moves to the sensor and performs a measurement within seconds to determine whether the TCP
has deviated from the reference position. Based on user-defined tolerance limits, the system automatically evaluates whether the deviation is acceptable.
If required, the TCP data can be corrected automatically or an alert can be sent directly to the PLC.
Measurement data can also be sent via MQTT.
Integration into existing systems is quick and straightforward, as the sensor requires only minimal installation space.
During initial setup, the robot motion to the sensor is defined within the robot program and a reference TCP measurement is recorded.
The measurement mode (2D or 3D), the assigned digital I/O, and the tolerance limits are configured at this stage.
A guided setup wizard walks operators step by step through the entire process, which typically takes only a few minutes.
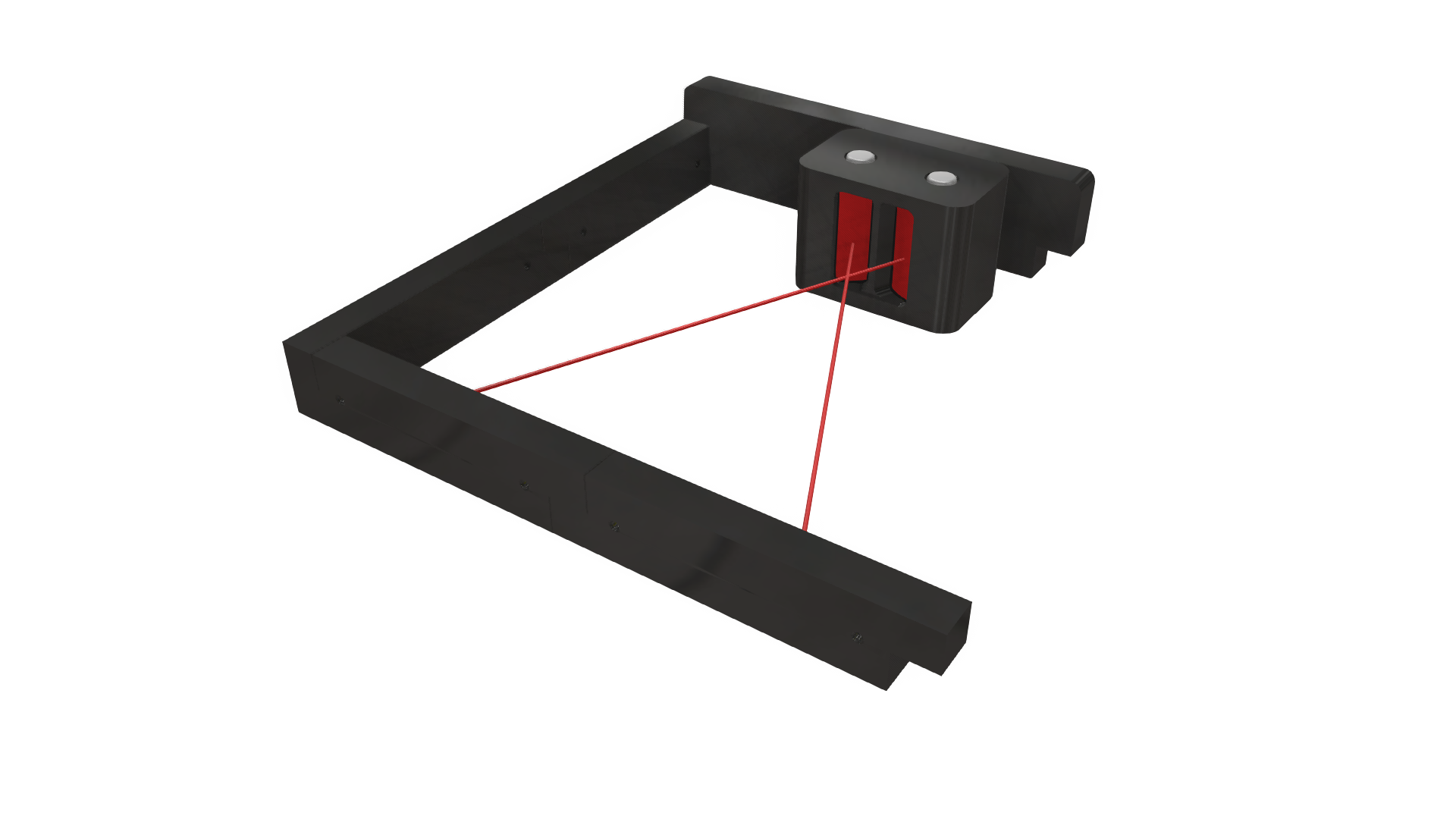
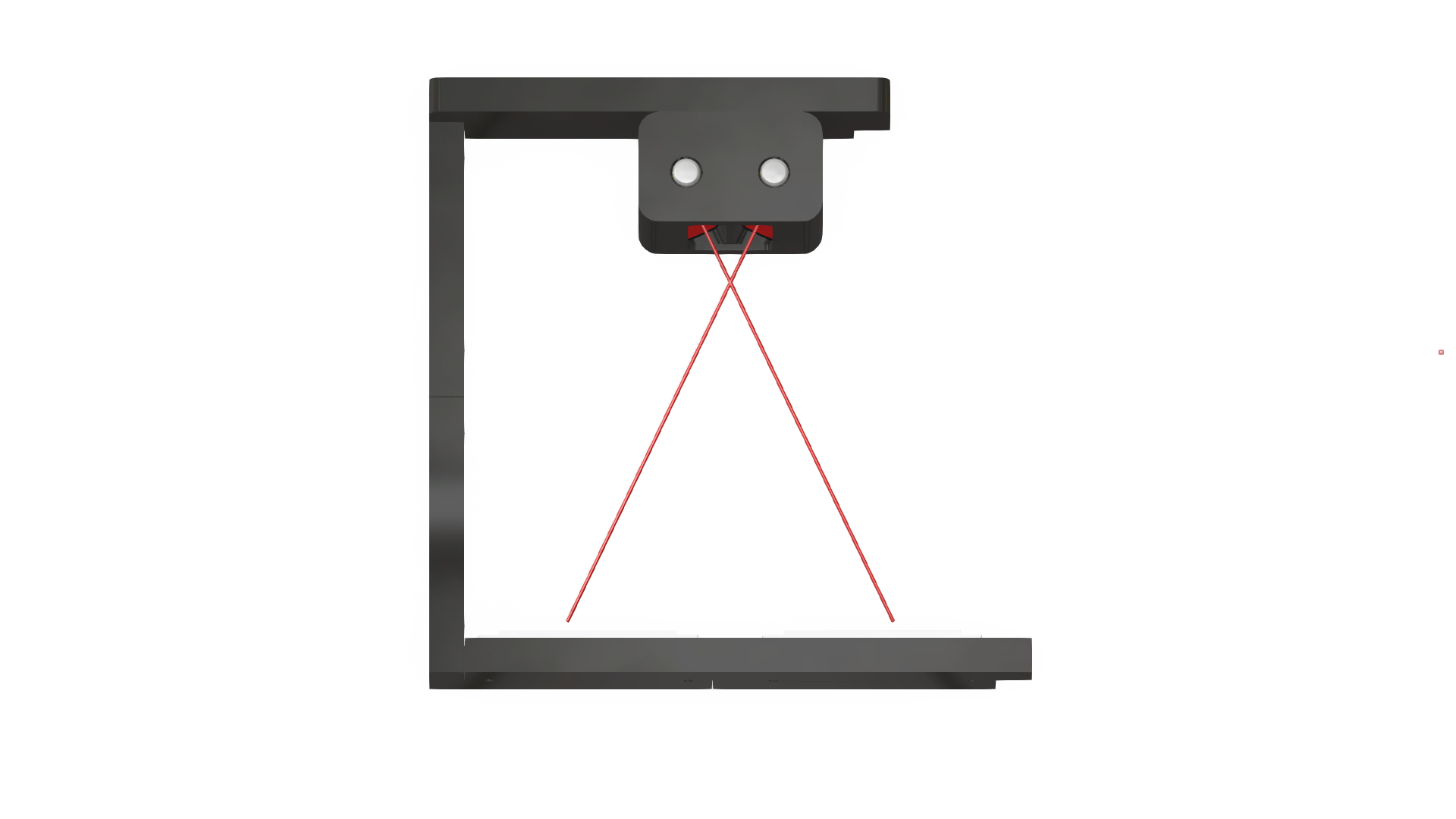
The sensor contains two laser measurement units, each connected to a digital input on the robot controller.
No additional hardware, such as an external evaluation unit, or other software is required.
The required software package is included and can be installed directly on the robot controller or via KUKA.WorkVisual.
No additional KUKA technology packages are necessary.
All rotationally symmetric tool geometries can be measured, including but not limited to:
- Welding torches
- Welding wire
- Spot welding guns
- Adhesive dispensing nozzles
- Stud welding guns (including support foot)
- Plasma cutters
- Joining pins
- and many more
TextTextText
- 2D and 3D TCP verification for rotationally symmetric robot tools
- Automatic TCP correction within configurable tolerance limits
- Integrated diameter measurement
- Clear display of measurement data via HMI plugin
- Requires a maximum of two digital inputs on the robot controller
- Visualization on the SmartPAD
- Integrated measurement data logging
- Supports up to 64 tools (robot-mounted and external tools)
- Inline forms for TCP and diameter verification
- Measurement function can be easily enabled or disabled during operation
- Multiple alert scenarios when tolerance limits are exceeded
- No additional hardware or software required
- Available as KOP for KUKA KSS 8.3, 8.5, 8.6, and 8.7
- Soon available for iiQKA.OS2
- MQTT ready
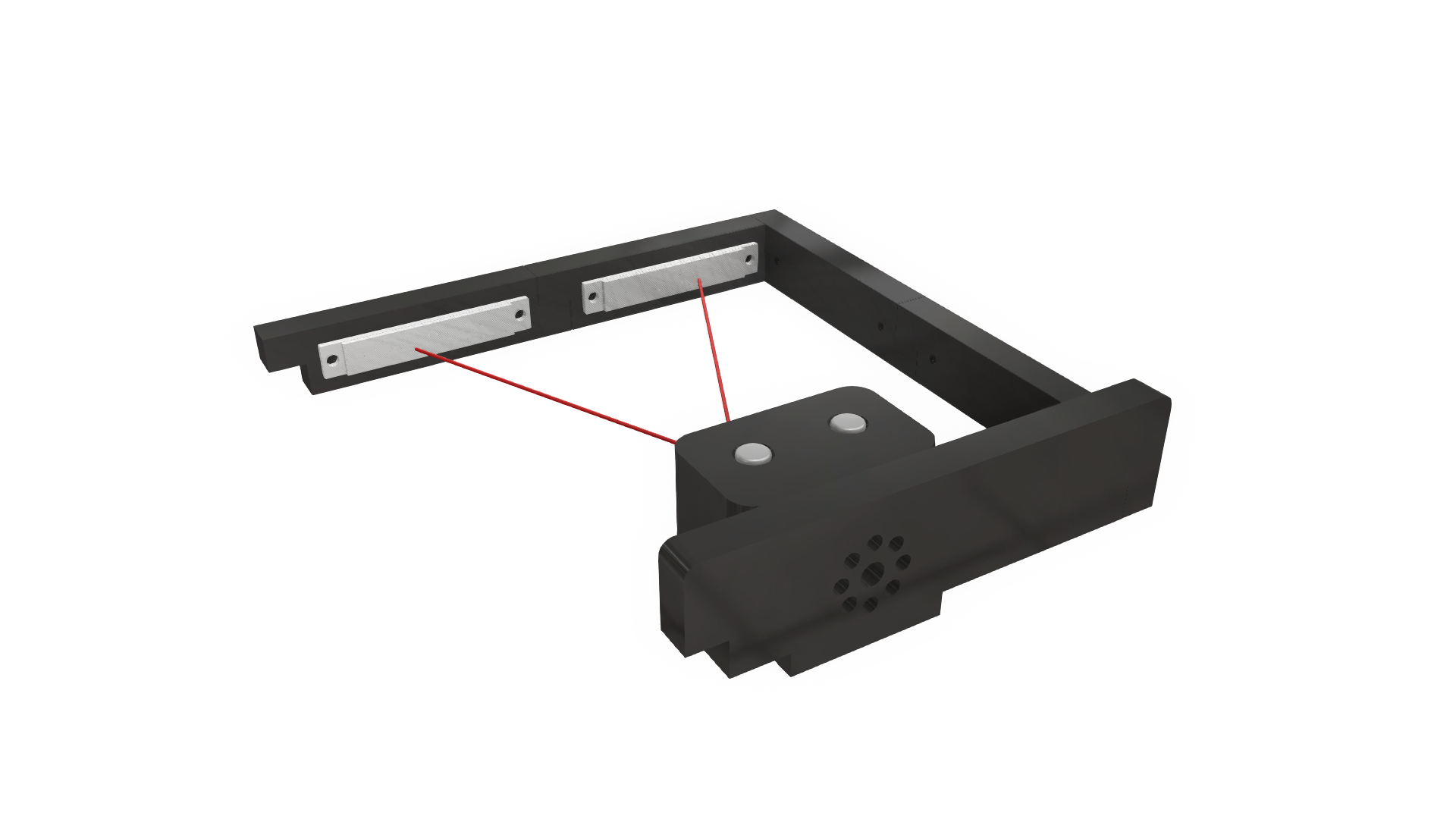
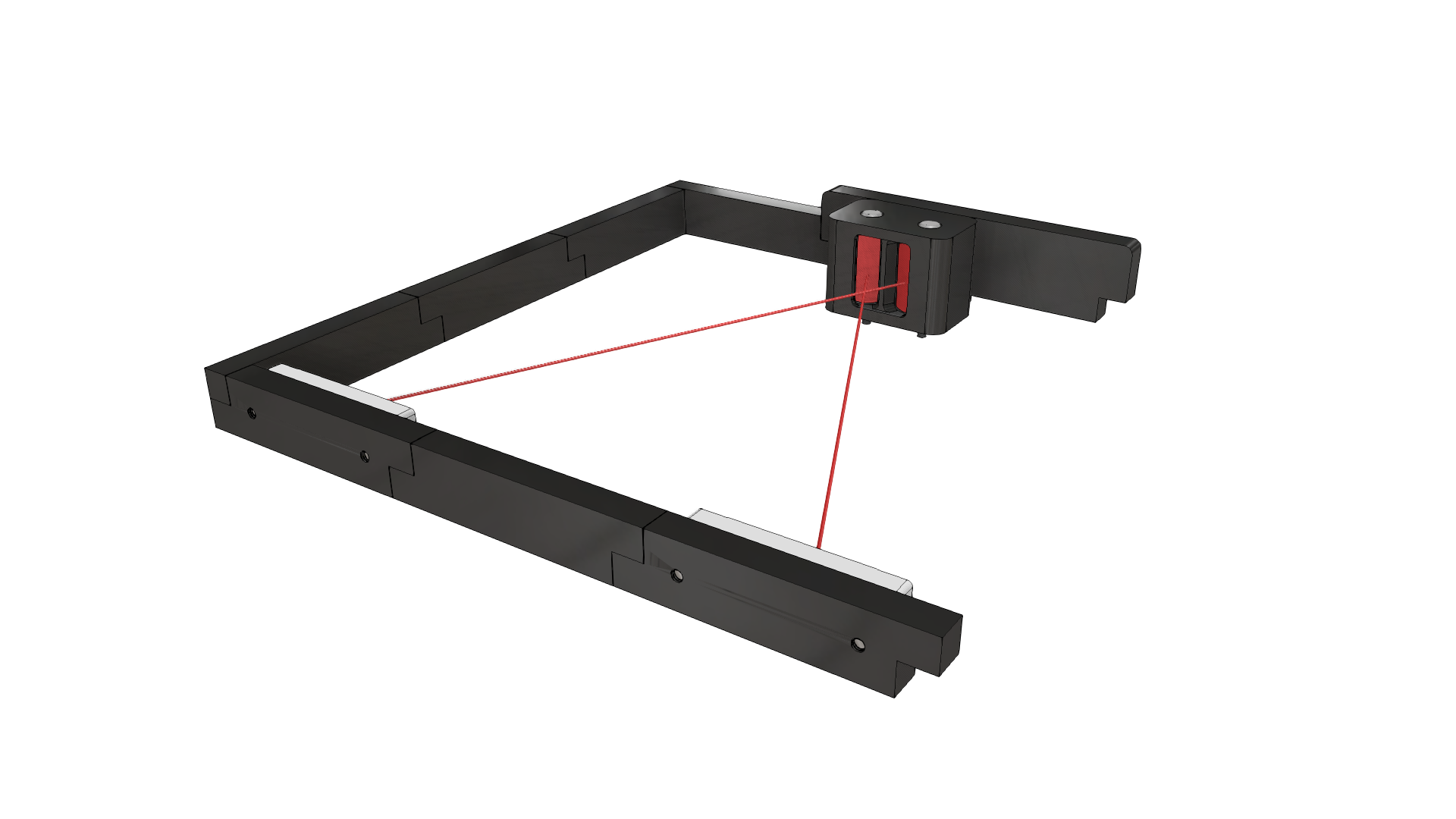
- Sensor housing with 2 reflective light barriers
- Reflector holder including mounting material
- Holder for aluminum profile tubes
- Y-connector M12 plug / 2x M12 socket A-cod. 1x5-pin / 2x 4-pin
- Documentation in German and English
- KUKA KRC4 or KRC5 robots
- Housing dimensions: 52 x 32 x 38 mm (W x D x H)
- Two retro-reflective photoelectric laser sensors
- Operating voltage: +UB 10–30 V DC
- Light source: red laser (EN 62471 compliant)
- No-load current: I0 ≤ 30 mA per sensor
- Output current: Ie ≤ 100 mA per sensor
- Sensing range: 20–250 mm
- Connection: 4-pin M8 x 1 connector per sensor
KSS 8.3, 8.5, 8.6, 8.7