Quality Assurance through Automated TCP Verification
With TCP.control, you ensure the precision of your robot processes – fully automated and during ongoing production.
Deviations from the tool TCP are continuously monitored and, if necessary, corrected immediately. This helps prevent scrap, rework, and unnecessary downtime.
- ✅ Fully automated TCP verification
- ✅ Easy integration – commissioning in just a few minutes
- ✅ Flexible alarm functions when tolerance limits are exceeded
- ✅ Clear HMI visualization of results
- ✅ Complete system: software and hardware included
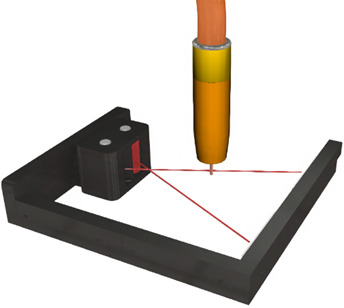
How It Works
A simple function call via an inline form in the robot program starts the TCP verification.
The robot automatically moves to the sensor and within seconds measures whether deviations from the reference TCP are present.
Configurable tolerance limits determine whether a deviation is acceptable. If required, TCP data can be updated automatically or a notification can be sent to a PLC.
Transmission of measurement data via MQTT is also supported.
- ✅ Automatic correction – TCP data can be updated instantly if required
- ✅ PLC integration – notifications directly to higher-level control systems
- ✅ Real-time data – measurement values can be transmitted via MQTT (additional software required)
- ✅ Verification within seconds – no production interruption
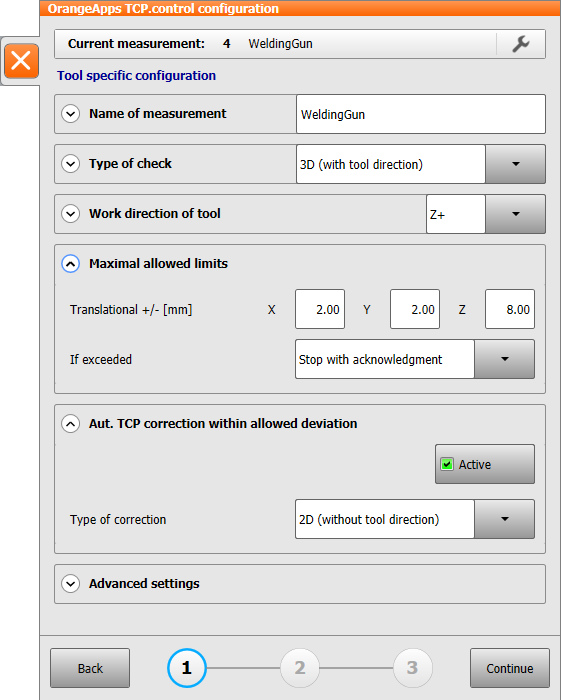
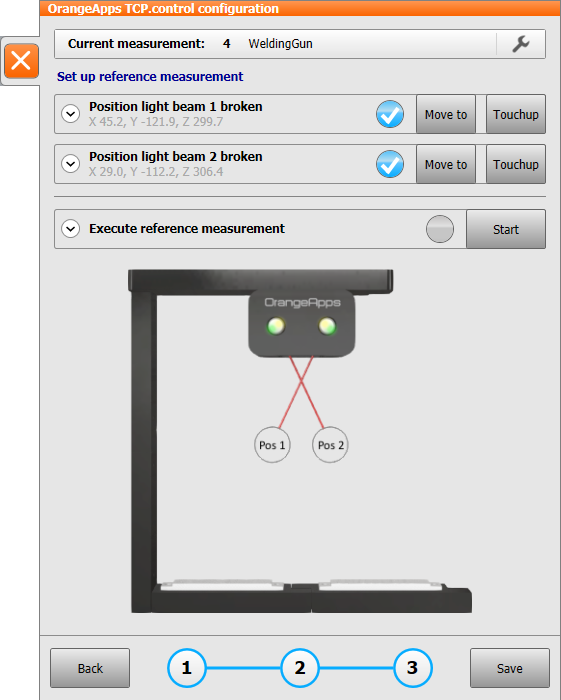
Integration and Commissioning
The compact sensor requires minimal space and integrates seamlessly into your system.
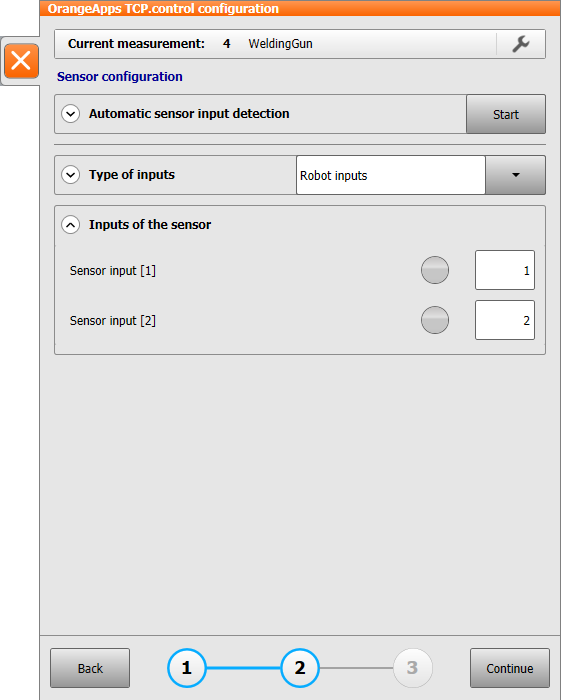
Within minutes, you define the robot motion, perform the reference measurement, and configure measurement type, digital inputs, and tolerances.
Our intuitive commissioning assistant guides you step by step – fast, simple, reliable.
- ✅ Minimal installation time – ready for use within minutes
- ✅ Seamless integration – fits any existing robot cell
- ✅ Flexible measurement modes – 2D or 3D, individually configurable
- ✅ Automated precision – including reference measurement and tolerance monitoring
- ✅ No downtime – everything during ongoing operation
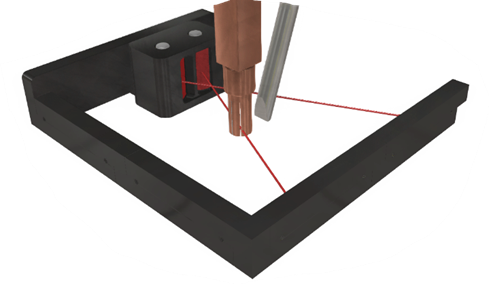
Electrical Connection
The sensor includes two laser retro-reflective photoelectric sensors, each connected to a digital input of the robot controller. Additional hardware, such as an evaluation unit, is not required.
- ✅ Two integrated laser retro-reflective photoelectric sensors
- ✅ Direct connection to digital inputs of the robot controller
- ✅ No additional hardware or evaluation unit required
Software
The required software component is included in the technology package. It can be conveniently installed directly on the robot or via KUKA.WorkVisual. No additional KUKA technology packages or other software are required.
- ✅ Required software component included in the technology package
- ✅ Installation directly on the robot or via KUKA.WorkVisual
- ✅ No additional KUKA technology or software required
Measurable Tool Geometries
All rotationally symmetrical geometries can be measured, for example:
- ✅ Welding torches
- ✅ Welding wire
- ✅ Spot welding guns
- ✅ Adhesive nozzles
- ✅ Stud welding guns (including support foot)
- ✅ Plasma cutters
- ✅ Joining studs
- and many more.
Video
Summary
Features
- 2D and 3D TCP verification of rotationally symmetrical robot tools
- Easy integration via commissioning assistant
- Auto TCP correction within configurable limits
- Data logging and visualization of measurement values in the display plugin
- Only 2 digital inputs required on the robot
- Up to 64 measurable tools (robot and external tools)
- Function call via inline form
- Easy activation and deactivation of measurement during operation
- Configurable notification scenarios when tolerance limits are exceeded
- MQTT ready (additional software required)
Scope of Delivery
- Technology package (KOP) for easy installation directly on the robot or via KUKA.WorkVisual
- Sensor housing with 2 retro-reflective photoelectric sensors
- Reflector holder 'Standard' incl. mounting material
- Mount for aluminum profile tubes
- Y-connector M12 plug / 2x M12 socket, A-coded
- Documentation in German and English
Robots
- KUKA KRC4 or KRC5 robots
- Coming soon for iiQKA.OS2
Hardware Specifications
- Housing dimensions 52 x 32 x 38 mm (W x D x H)
- Operating voltage +UB 10…30V DC
- Light type: red laser, Class 1 (EN 62471)
- No-load current I0 ≤ 30 mA (per light beam)
- Output current Ie ≤ 100 mA (per light beam)
- Connection cable 4-pin, M12 (per light beam)
Requirements
KSS 8.3, 8.5, 8.6, 8.7